DevOps Tool
2024
Developer & Maintainer
ROS2 Docker Launcher
Cross-platform ROS2 environment launcher with automated setup
Overview
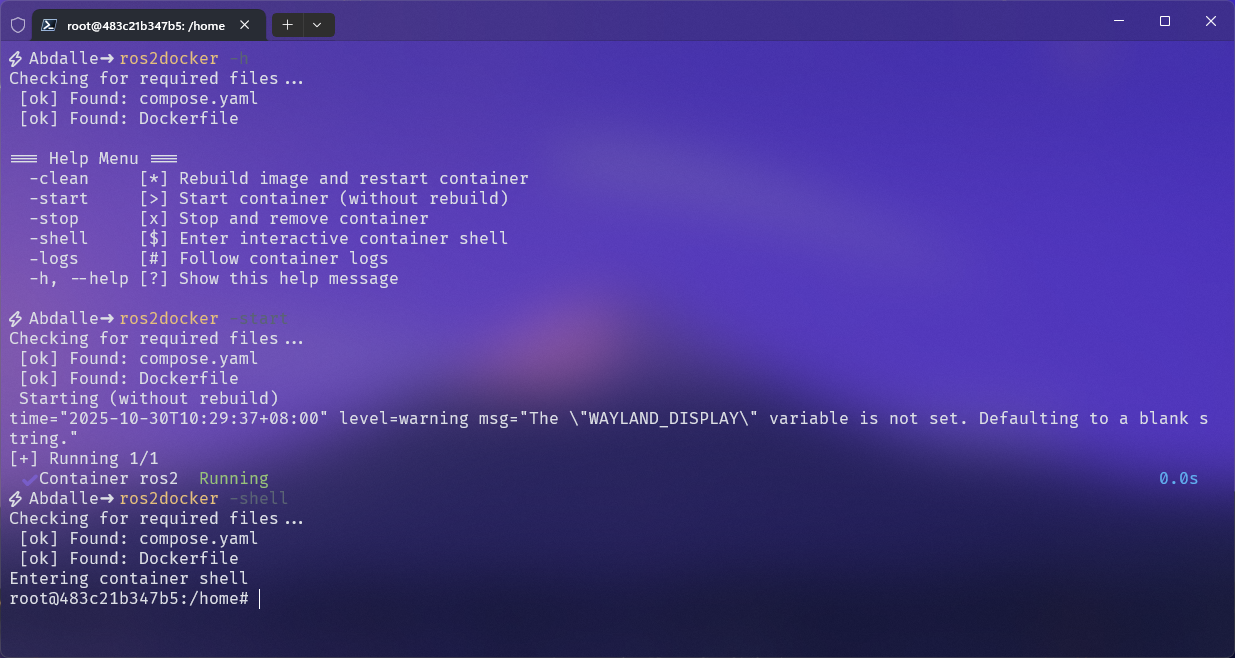
A developer tool that simplifies the setup and deployment of ROS2 (Robot Operating System 2) environments using Docker containers. This tool eliminates the complexity of manual ROS2 installation and configuration by providing automated setup scripts that work across different operating systems. It includes GUI support through X11 forwarding, making it ideal for robotics development and testing.
Code Highlight
Docker Container Launcher
bash
services:
ros2:
build: .
image: robot:latest
container_name: ros2
volumes:
#- .:/home
- {PWD}:/home
- /tmp/.X11-unix:/tmp/.X11-unix:rw
- {XAUTHORITY}:{XAUTHORITY}
working_dir: /home
environment:
- DISPLAY={DISPLAY} # this is for X11 or XWayland
- WAYLAND_DISPLAY={WAYLAND_DISPLAY} # this is for Wayland sessions
- QT_QPA_PLATFORM=xcb # Explicitly tell Qt to use XCB
stdin_open: true
tty: true
command: bash && pwd && colcon build
}Performance Metrics
Container Startup
< 5 seconds
X11 Latency
< 10ms
Setup Time
< 2 minutes
Challenges
- 1Handling X11 forwarding across different operating systems
- 2Managing Docker networking for ROS2 communication
- 3Creating a user-friendly CLI interface for complex operations
Outcomes & Impact
Reduced ROS2 setup time from hours to minutes
Adopted by 50+ developers in the robotics community
Zero configuration required for basic use cases
Tech Stack
BashDockerX11ROS2Linux
Features
- •One-command automated ROS2 environment setup
- •Cross-platform support (Linux, macOS, Windows)
- •GUI application support via X11 forwarding
- •Global installation for easy access
- •Automatic dependency checking and installation
- •Customizable container configurations